

المولد الكهربائي: لقد تم بالفعل بذل العديد من الجهود لاستعادة الطاقة من تحركات المياه المختلفة ، على سبيل المثال ، قطرات المطر وأمواج البحر والمد والجزر. ولكن للحصول على كثافة طاقة كهربائية كافية ، كان لا بد من اللجوء إلى المولدات أو المولدات الثقيلة والثقيلة التي تتطلب تدفقًا عاليًا من الماء لتشغيل التوربينات وأصبح غير فعال تمامًا عند التدفق المنخفض. في المقابل ، لم توفر مولدات قطرات الماء التي تعمل بالكهرباء الاحتكارية حتى الآن سوى كثافة طاقة أقل من واط واحد لكل متر مربع.
جدول المحتويات
نبذة تعريفية:
الكهرباء الاحتكاكية هي الظاهرة الكهروستاتيكية الناتجة عن احتكاك مادتين مختلفتين. عند التلامس ، يتم نقل جزء من إلكترونات إحدى المادتين إلى الأخرى. عند الفصل ، يبقى هذا النقل ويتم تحميل المادتين بعلامات معاكسة.
باحثون من جامعة هونغ كونغ ، هونغ كونغ ، جامعة الصين للتكنولوجيا في الصين ، خفي ، آنهوي ، الصين ، جامعة نبراسكا ، لينكولن ، الولايات المتحدة الأمريكية ، جامعة الصين للتكنولوجيا ، خفي ، آنهوي ، الصين ، جامعة العلوم والتكنولوجيا في طورت الصين ، وتشنغدو ، والصين ، والأكاديمية الصينية للعلوم ، بكين ، الصين جهازًا يجمع الطاقة من قطرات الماء المتساقطة بكفاءة أعلى بعدة مرات من الأجهزة الكهربائية الاحتكاكية الموجودة حتى ذلك الحين.
تجربة المولد الكهربائي قطرة الماء الجديد (GEG):
يعتمد هذا الجهاز أولاً وقبل كل شيء على حقيقة أن التأثير المتكرر لقطرات الماء على مادة عازلة يؤدي بعد عدد معين من التأثيرات إلى كثافة شحن ثابتة عالية على سطحها (الشكل 2. أ).
الركيزة الزجاجية المسطحة مغطاة بطبقة من أكسيد القصدير الإنديوم ، ITO. على هذا يتم ترسيب طبقة من polytetrafluoroethylene (PTFE ، عازل ممتاز معروف أيضًا باسم Teflon) مزود ، على الجانب ، بقطب كهربائي من الألومنيوم (الشكل 1.).
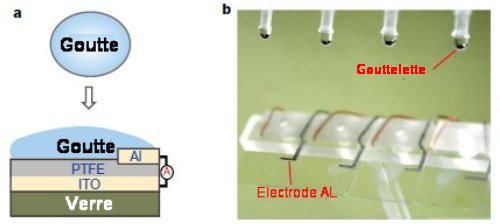
هذا الرسم تخطيطي لـ GEG صورة بصرية لأربعة أجهزة متوازية تم إنتاجها على نفس الشريحة الزجاجية. حجم كل قطرة 100 ميكرولتر.
عندما يسقط قطرة ، محايدة كهربيًا في الأصل ، باتجاه لوحة PTFE المشحونة ، فإنها تكون مستقطبة ، أي تحت تأثير المجال الكهربائي الناتج عن اللوحة ، يتم تحفيز الشحنات المعاكسة في أسفل وأعلى القطرة. سيؤدي الانخفاض أيضًا إلى تشويه الانخفاض الذي سيؤدي إلى إزاحة الشحنات على PTFE و ITO. عندما يتم سحق القطرة على سطح PTFE ، فإنها ستلمس ، في نهاية هذا ، قطب الألومنيوم ، وبالتالي توصيله بـ PTFE / ITO وبالتالي إغلاق الدائرة.
إقرأ أيضا:تحليل الضوء الأبيض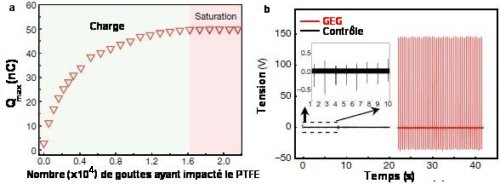
أ) عندما تؤثر القطرات على الجهاز في الشكل 1. ، تزداد كمية الشحن على سطح PTFE إلى قيمة ثابتة تسمى التشبع.
ب) منحنى أحمر على اليمين: في ظل نفس الظروف التجريبية ، بعد تشبع شحنة السطح ، عندما تسقط كل قطرة ، يرتفع الجهد إلى الحد الأقصى (هنا بترتيب 150 فولت) ثم ينخفض إلى الصفر حتى التأثير من القطرة التالية. تردد القطرات 4.2 هرتز وعددها 84 وارتفاع السقوط 15 سم.
يتم قياس الجهد بين موصل ITO تحت PTFE وقطب الألومنيوم.
منحنى أسود، على اليسار: نفس الظاهرة مع جهاز تحكم بدون قطب كهربائي من الألومنيوم. تردد 20 قطرة هو 1 هرتز
، ويمكن ملاحظة أن توليد الكهرباء أصغر من المنحنى الأحمر بمقدار أمرين.
تجربة المولد الكهربائي على قناديل البحر:
البروفيسور زوانكاي وانغ: يعرض مقطع الفيديو التالي تفاصيل الانهيار الناتج عن هبوط في GEG. بمجرد ملامسته لسطح PTFE والإلكترود Al (مرئي بوضوح إلى يمين الصورة) ، هناك زيادة سريعة في الشحن. مع تسطح القطرة واتساعها ، يستمر نقل الشحنة بين ITO وإلكترود الألمنيوم بحد أقصى 49.8 nC (49.8 nanocoulombs) المقابلة لأقصى مساحة للسقوط. يمكن ملاحظة أنه بعد 16 مللي ثانية (وقت متقطع ) ، تنفصل قطرة الماء تمامًا عن القطب الكهربائي Al وتنخفض شحنة الأخير إلى الصفر. لذلك تم نقل كل الأحمال إلى ITO .
إقرأ أيضا:تحليل الضوء الأبيضالبروفيسور Zuankai WANG :
من خلال ضبط قطر الأنابيب الشعرية وارتفاع السقوط ، يمكننا التحكم بدقة في حجم وسرعة القطرات التي تؤثر على صف GEGs. يجب أن نعجب بساطة هذا النظام الذي يحول الطاقة الحركية للقطرات إلى طاقة كهربائية.
الإلكترونيات الدقيقة للمولد الكهربائي:
إن التحكم في حركة الحيوان يمكن أن يجعل من الممكن تنفيذ الإجراءات التي يتم إجراؤها فيما يسمى بأنظمة الروبوتات “اللينة”. نجح باحثون في جامعة ستانفورد ، ستانفورد ، كاليفورنيا ، الولايات المتحدة الأمريكية ، في تحميل الإلكترونيات الدقيقة في قناديل البحر التي تتحكم في السباحة. لمضاعفة سرعة قنديل البحر بثلاثة ، لا يتطلب الأمر سوى طاقة خارجية تبلغ 10 ميغاواط. هذا يجعل من الممكن التفكير في أن الروبوتات الهجينة سيكون لها أداء يتكيف مع مراقبة المحيطات.
يستخدم قنديل البحر القليل جدًا من الطاقة لكل وحدة مسافة تقطعها.
ولذلك فهي تشكل نماذج لروبوتات الإزاحة تحت الماء. (راجع مدونة 4 مايو 2012: روبوت مقلد حيويًا تحت الماء على شكل قنديل البحر ).
لكن هذه الروبوتات الميكانيكية التي تحاكي الأسماك وقناديل البحر تستهلك طاقة دفع تزيد بمقدار 10 إلى 1000 مرة عن الأخيرة.
الاهتمام بالاستخدام المباشر لعلم الأحياء في الروبوتات:
من خلال أخذ قنديل البحر الحي كمركبات بحرية ، استخدم الباحثون عملية التمثيل الغذائي القاعدية بعدة طرق:
- تقليل استهلاك الطاقة.
- استخدام عضلاتهم لأداء الأعمال المطلوبة.
- أن تكون قادرًا على الاعتماد على خصائص الشفاء الذاتي والتجدد في مواجهة الحوادث المحتملة.
لهذه الأسباب ، وعلى الرغم من ضرورة إجراء دراسات إضافية لزيادة قدرتها على المناورة ، فإن هذه “الروبوتات الحيوية” تتفوق على روبوتات السباحة التي تم إنتاجها بالفعل.
لقنديل البحر موائل ذات ملوحة متنوعة للغاية ودرجات حرارة وتركيزات أكسجين وأعماق مختلفة. يسمح هذا بنشر هذه الروبوتات الحيوية عبر جميع المحيطات. يمكن أن يؤدي استخدامها الخاضع للرقابة إلى زيادة كبيرة في عدد بيانات المراقبة المحيطية.
لكنهم سيكونون أيضًا قادرين على توفير بيانات علمية حول تفاعل الحيوان مع البيئة السائلة التي تحيط به. الحركة ضرورية لقنديل البحر للتغذية ، والهروب من الحيوانات المفترسة ، والتكاثر. يسمح التحكم في السباحة بالنظر في مجال واسع من دراسة بيولوجيا وبيئة حركته في المختبر وفي التجارب في الموقع في البحر.
نظام التحكم في السباحة لقنديل البحر عبر المولد الكهربائي:
A. aurita هو قنديل البحر الذي يتكون من مظلة مسطحة مع طبقة أحادية من العضلات الإكليلية والشعاعية تغطي مظلتها الفرعية. تتسبب هذه العضلات ، عن طريق الانقباض ، في خروج الماء من المظلة ، وبالتالي دفع الحيوان. يتم إرسال النبضات العصبية التي تتحكم في هذه الانقباضات إلى أحد مواقع المستقبلات الثمانية الموجودة في الأعضاء الحسية ، وهي rhopalies ، الموزعة حول حافة المظلة (الشكل 1 أدناه).
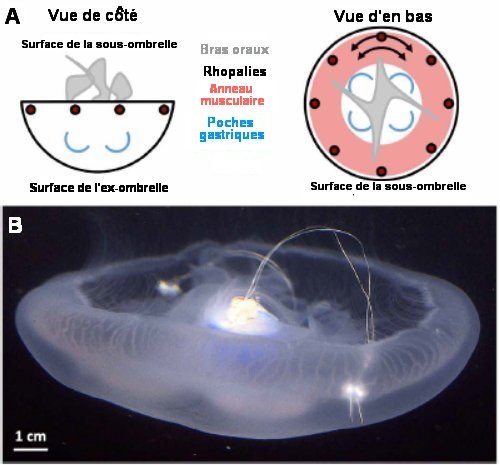
رسم تخطيطي مبسط لتشريح A. aurita مع مظلة فرعية ، مظلة سابقة ، rhopalies ، حلقة عضلية وأكياس معدة.
ب) صورة لقنديل البحر الذي يسبح بحرية ، تحت المظلة لأعلى ، مزود بجهاز تحكم في السباحة (غير نشط هنا). يتم وضع قضيب الدعم الخشبي في مانوبريوم. يتم إدخال قطبين كهربائيين في الحلقة العضلية و mesoglea على حافة المظلة.
من الإلكترونيات الدقيقة منخفضة الطاقة المضمنة في قنديل البحر الحي تعزز الدفع.
نيكول دبليو شو وجون دابيري
تحقيق التجربة على قنديل البحر الحي:
طور الباحثون وحدة تحكم إلكترونية دقيقة بالسباحة قائمة بذاتها تتكون من معالج دقيق وبطارية ليثيوم. ينتج نبضة كهربائية مربعة بسعة 3.7 فولت ومدة 10 مللي ثانية. يمكن ضبط تردد التكرار لهذه النبضة من 0.25 إلى 1.00 هرتز ، ويتم توصيل قطبين بلاتينيين تم إدخالهما في قنديل البحر بجهاز التحكم عن طريق موصلات متصلة بمصابيح.
سرعة السباحة لقنديل البحر مزودة بجهاز تحكم
تم قياس سرعات السباحة لقنديل البحر المجهز بجهاز تحكم في خزان مياه مالحة أبعاده 1.8 م × 0.9 م × 0.9 م. يتم إدخال قنديل البحر في الجزء العلوي من الخزان ويتم تصويرهم وهم يسبحون نحو القاع. يتم تنفيذ ذلك بترددات إثارة مختلفة تتراوح من 0 هرتز (جهاز تحكم غير نشط ، نبضات داخلية ، بسبب قنديل البحر وحده) حتى 1.1 هرتز.
يتوافق مجال التردد هذا مع مجال الترددات الداخلية.
تتم مقارنة سرعات السباحة المقاسة أيضا, بالسرعة عند 0 هرتز ، أي بدون تحفيز.
كانت السرعة القصوى المرصودة 2.8 ضعف سرعة السباحة الطبيعية لـ A. aurita.
لا يمكن كذلك , زيادة تردد التحفيز فوق 1.1 هرتز لأنه مع كل انقباض ، يجب إتاحة وقت كافٍ للعضلة حتى تسترخي قبل النبض التالي.
المتحكم الإلكتروني الدقيق للروبوت الحيوي المكون من قنديل البحر والمجهز به يستهلك 0.06 واط / كجم عند 0.25 هرتز ، 0.13 واط / كجم عند 0.50 هرتز و 0.13 واط / كجم عند 0.88 هرتز.
بالمقارنة أيضا,مع الروبوتات الموجودة ، فإنه يستخدم طاقة خارجية أقل 1000 مرة (هنا من البطارية) لكل كتلة biorobot ، بما في ذلك كتلة الحيوان ووحدة التحكم.
يكون التشوه الهندسي أيضا, للمظلة أثناء السباحة من نفس الترتيب للسباحة الحرة أو السباحة الخاضعة للتحكم.

